Multi-phone localization#
Sound source distance#
Let the location of hydrophone \(i\) be \(h_i = (x_i,y_i.z_i)\) and the source location be \(s=(s_x,s_y,s_z)\) then the distance of the source from the hydrophone is related by
which becomes
or in short
Having more then 1 hydrophone, then for any pair of hydrophones \((h_i, h_j)\) one can form the difference obtaining
Noting that \(R_i^2-R_j^2=(R_j+(\delta R_{ij}))^2-R_j^2 = 2(\delta R_{ij})R_j+(\delta R_{ij})^2 \)
one gets the linear equation
or, by putting the unknown source location to the left side and dividing by 2
System of equations#
Let the number of hydrophones be \(n+1\) then one gets \(n\) equations
or in matrix notation
whereby
Pseudo inverse#
A system of equations for three unknows \(s=(s_x,s_y,s_z)\) cannot be solved without additional constraints if the number of independent equations is different of three. The additional constraint, whicht is typically assumed is that the vector norm \(||s|| \to \min\) that leads to the (Penrose) pseudo inverse \(A^+\)
Definintion of pseudo inverse \(A^+\)
For an underdetermined system, i.e. number of equation < number of unknows, or rank of matrix \(A\) < numbers of unknown, the pseudo inverse is given by
For an overdetermined system, i.e. number of equation > number of unknows, or rank of matrix \(A\) < numbers of equations, the pseudo inverse is given by
which is the classical least mean square (LMS) fit
Source location and range estimation#
With
the source vector becomes
Knowing that
or
one obtains a quadratic equation in \(R_0\)
Quadratic equation#
For a quadratic equation
the solution is known to be
To apply the solution of a quadratic equation one defines
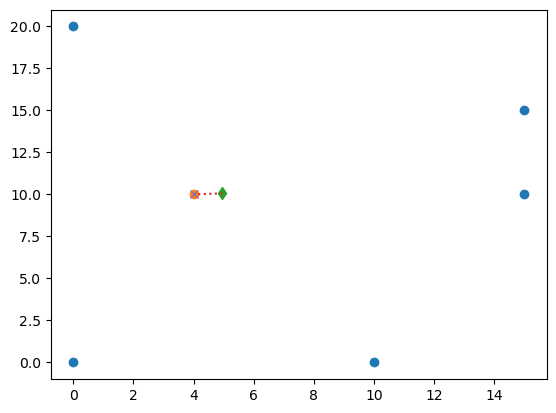
Localization with five or more hydrophones#
Five or more hydrophones allow at least 4 hydrophone pairs that in matrix notation are written as
method 1#
Let the number of hydrophones be \(n+1\) then one gets \(n\) equations
that again transforms to a vector
with
import numpy as np
import matplotlib.pyplot as plt
# five hydrophones
# method 1
h=np.array([[0,0,0],[10,0,0],[0,20,0],[15,15,5],[15,10,5]])
D=h[1:,:]-h[0,:].reshape(1,-1)
DI=np.linalg.pinv(D)
#simulasted whale location
w=np.array([4,10,2])
# whale directions from hydrophone
D=w-h
# slant ranges
R=np.sqrt(np.sum(D**2,1))
# for selecting hydrophone pairs
im1=[1,2,3,4]
im0=[0,0,0,0]
#
# simulated path differences
DR=R[im1]-R[im0]
def direction(DI,h,im1,im0,DR):
# estimation method 1
b0=1/2*(np.sum(h[im1,:]**2,1) - np.sum(h[im0,:]**2,1)-(DR**2))
b1=DR
u0=(DI@b0).reshape(-1,1)
u1=(DI@b1).reshape(-1,1)
# direction estimation
az=np.arctan2(-u1[1],-u1[0])*180/np.pi
el=np.arctan2(-u1[2],np.sqrt(u1[0]**2+u1[1]**2))*180/np.pi
return u0,u1,az,el
u0,u1,az,el=direction(DI,h,im1,im0,DR)
# check with simulation
z=w-u0.T
z1=z/np.sqrt(np.sum(z**2))
azo=np.arctan2(z1[0,1],z1[0,0])*180/np.pi
elo=np.arctan2(z1[0,2],np.sqrt(z1[0,0]**2+z1[0,1]**2))*180/np.pi
print('z:',z)
print('u1:',u1.T)
print('az:',az, 'el:',el)
print('azo:',azo,'elo:',elo)
# range estimation
def rangeEstimation(u0,u1,h):
h0=h.reshape(-1,1)
aa=np.sum(u1**2)-1
bb=-np.sum((u0-h0)*u1)
cc=np.sum((u0-h0)**2)
r0=(-bb-np.sqrt(bb*bb-aa*cc))/(aa)
S=(u0-u1*r0)[:,0]
return S,r0
S,r0=rangeEstimation(u0,u1,h[0,:])
print('S:',S,'r0:',r0)
# to visualize direction
rr=np.arange(0,10,0.01)
vv=u0-u1*rr
if 1:
plt.plot(h[:,0],h[:,1],'o')
plt.plot(w[0],w[1],'o')
plt.plot(u0[0],u0[1],'d')
plt.plot(vv[0,:],vv[1,:],':')
plt.plot(S[0],S[1],'x')
plt.show()
z: [[-0.9614814 -0.06958701 0.93023403]]
u1: [[ 0.08777084 0.0063524 -0.08491836]]
az: [-175.86044785] el: [43.9788835]
azo: -175.8604478533724 elo: 43.97888350072386
S: [ 4. 10. 2.] r0: 10.95445115010333
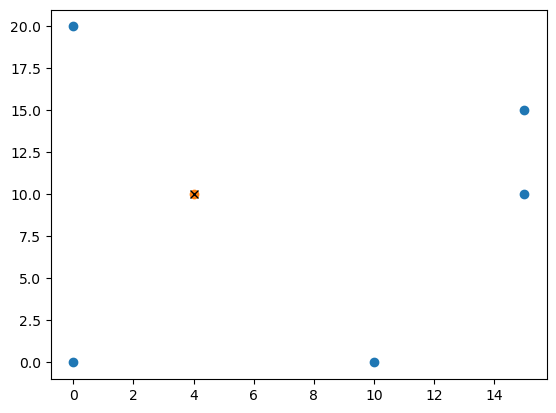
method 2#
Let the number of hydrophones be again \(n+1\) then one gets \(n\) equations
The solution of which using the LMS pseudo inverse gives directly the source co-ordinates and the source range from the reference hydrophone
import numpy as np
import matplotlib.pyplot as plt
# five hydrophones
# method 2
h=np.array([[0,0,0],[10,0,0],[0,20,0],[15,15,5],[15,10,5]])
#simulasted whale location
w=np.array([4,10,2])
# whale directions from hydrophones
RX=w-h
# slant ranges
R=np.sqrt(np.sum(RX**2,1))
# for selecting hydrophone pairs
im1=[1,2,3,4]
im0=[0,0,0,0]
#
# simulated path differences
DR=R[im1]-R[im0]
# estimation method 2
def localization(h,im1,im0,DR):
b0=1/2*(np.sum(h[im1,:]**2,1) - np.sum(h[im0,:]**2,1)-(DR**2))
b1=DR
D=h[im1,:]-h[im0,:]
A=np.append(b1.reshape(-1,1),D,1)
AI=np.linalg.pinv(A)
u0=AI@b0
r0=u0[0]
S=u0[1:]
return S,r0
S,r0=localization(h,im1,im0,DR)
# check with simulation
print('w:',w,'S:',S)
print('R[0]:',R[0],'r0:',r0)
if 1:
plt.plot(h[:,0],h[:,1],'o')
plt.plot(w[0],w[1],'o')
plt.plot(S[0],S[1],'kx')
plt.show()
w: [ 4 10 2] S: [ 4. 10. 2.]
R[0]: 10.954451150103322 r0: 10.954451150103374
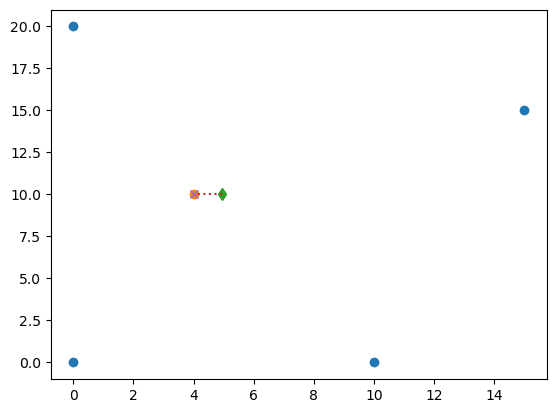
Four-hydrophone localization#
Four hydrophones allow 3 hydrophone pairs that in matrix notation are written as
or equivalently
and the solution is obtained via the quadratic equation in \(R_0\)
import numpy as np
import matplotlib.pyplot as plt
# four hydrophones
h=np.array([[0,0,0],[10,0,0],[0,20,0],[15,15,5]])
D=h[1:,:]-h[0,:].reshape(1,-1)
DI=np.linalg.pinv(D)
#simulasted whale location above hydrophone plane
w=np.array([4,10,2])
# whale directions from hydrophone
D=w-h
# slant ranges
R=np.sqrt(np.sum(D**2,1))
# for selecting hydrophone pairs
im1=[1,2,3]
im0=[0,0,0]
#
# simulated path differences
DR=R[im1]-R[im0]
u0,u1,az,el=direction(DI,h,im1,im0,DR)
# check with simulation
z=w-u0.T
z1=z/np.sqrt(np.sum(z**2))
azo=np.arctan2(z1[0,1],z1[0,0])*180/np.pi
elo=np.arctan2(z1[0,2],np.sqrt(z1[0,0]**2+z1[0,1]**2))*180/np.pi
print('z:',z)
print('u1:',u1.T)
print('az:',az, 'el:',el)
print('azo:',azo,'elo:',elo)
# range estimation
S,r0=rangeEstimation(u0,u1,h[0,:])
print('S:',S,'r0:',r0)
# to visualize direction
rr=np.arange(0,10,0.01)
vv=u0-u1*rr
if 1:
plt.plot(h[:,0],h[:,1],'o')
plt.plot(w[0],w[1],'o')
plt.plot(u0[0],u0[1],'d')
plt.plot(vv[0,:],vv[1,:],':')
plt.plot(S[0],S[1],'x')
plt.show()
z: [[-0.9614814 0. -0.3919192]]
u1: [[8.77708416e-02 1.91364755e-17 3.57771647e-02]]
az: [-180.] el: [-22.17679975]
azo: 180.0 elo: -22.176799751820553
S: [ 4. 10. 2.] r0: 10.954451150103324
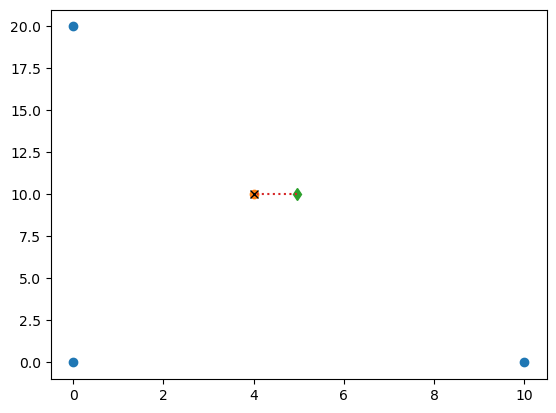
Three-hydrophone localization#
With three hydrophones once can form two pairs of hydrophones and one gets a system of two equations
which cannot be solved using standard algebraic methods (matix inversion), but requires the use of what is called a pseudo inverse and additional contraints or data.
To estimate source location with three hydrophones requires the knowledge of one component of the source vector. This is typically the z-component \(s_z\).
The source range \(R_0\) is then estimated ba adding the assumed z-component \(s_z\) as constant to the quadratic equation
import numpy as np
import matplotlib.pyplot as plt
# three hydrophones
h=np.array([[0,0,0],[10,0,0],[0,20,0]])
D=h[1:,:]-h[0,:].reshape(1,-1)
DI=np.linalg.pinv(D)
#simulasted whale location above hydrophone plane
w=np.array([4,10,2])
# whale directions from hydrophone
D=w-h
# slant ranges
R=np.sqrt(np.sum(D**2,1))
# for selecting hydrophone pairs
im1=[1,2]
im0=[0,0]
#
# simulated path differences
DR=R[im1]-R[im0]
u0,u1,az,el=direction(DI,h,im1,im0,DR)
# check with simulation
z=w-u0.T
z1=z/np.sqrt(np.sum(z**2))
azo=np.arctan2(z1[0,1],z1[0,0])*180/np.pi
print('z:',z)
print('u1:',u1.T)
print('az:',az)
print('azo:',azo)
# range estimation
# assume known z-component
u1[2]=0
u0[2]=w[2]
#
S,r0=rangeEstimation(u0,u1,h[0,:])
print('S:',S,'r0:',r0)
# to visualize direction
rr=np.arange(0,10,0.01)
vv=u0-u1*rr
if 1:
plt.plot(h[:,0],h[:,1],'o')
plt.plot(w[0],w[1],'o')
plt.plot(u0[0],u0[1],'d')
plt.plot(vv[0,:],vv[1,:],':')
plt.plot(S[0],S[1],'kx')
plt.show()
z: [[-0.9614814 0. 2. ]]
u1: [[0.08777084 0. 0. ]]
az: [-180.]
azo: 180.0
S: [ 4. 10. 2.] r0: 10.95445115010332
Two-hydrophone localization#
with two hydrophones, one can form a single pair and with \((i,j)=(1,0)\) the resulting single equation becomes
which cannot be solved for the source location without knowing two of the three components of the source vector. While sometimes the vertical, or z component of the source vector may be guessed an assumed, this is nearly impossible for the still missing horizontal component of the source vector.
With only two hydrophones, localization is nearly impossible, but the direction of the soundsource may still be obtained, if the source is far away.