Beamforming#
Beamforming is based on the fact that signal (here sound) arrives at different times at distributed (array of) sensors (here hydrophones).
While the direction of single sound source may be estimated ba measuring the relative delays within the hydrophone array and relating these measurements to the array geometry, beamforming analyses the arriving sound field for all possible direections (beams).
Basic formulation of single source direction finding#
Let the sound direction \(\hat S\) be given by
and the hydrophone location matrix \( H \) be given by
where the elements \((d_{ix},d_{iy},d_{iz}) \) are the \(x,y,z\) components of the 3-D vector that locates the hydrophones.
Let \(D_0\) be the hydrophone seperation matrix
then the vector of measurements \( m\) defined by
is estimated by the projection of the sound source direction onto the different hydrophone pairs.
The sound direction is then estimated from the measurement vector by
Line array#
In case where the array geometry is a line array then typically one assumes that \((h_{iy},h_{iz})=(0,0)\) and we get
Basic formulation of beamforming#
Let the sound pressure measured an a single hydrophone be a signal \(s\)
then in an array of hydrophones the measurements become
where \(\tau_i(\alpha,\beta)\) is the delay of the signal at hydrophone \(i\) with respect to som reference hydrophone and \(\alpha,\beta\) are the angles of arrival
For a line array with equally spaced hydrophones the delay has a simple form
where \(d\) id the hydrophone spacing, \(c\) is the sound speed at the hydrophone, and \(\gamma\) is the relative angle of arrival, that for a line array is composed of the azimuth \(\alpha\) and elevation angle \(\beta\).
The beamforming algorithm simply speaking tries to undo the signal delays \(\tau_i(\alpha,\beta)\) by compensating with negative delays
In cases, where \(\delta_i(\gamma)=\tau_i(\alpha,\beta)\) we get
indicating that the signal \(s(t)\) is completely reconstructed and that noise, that is assumed to be uncorrelated is attenuated.
In all other cases also the signal is attenuated die to delay mismatch.
Simulation#
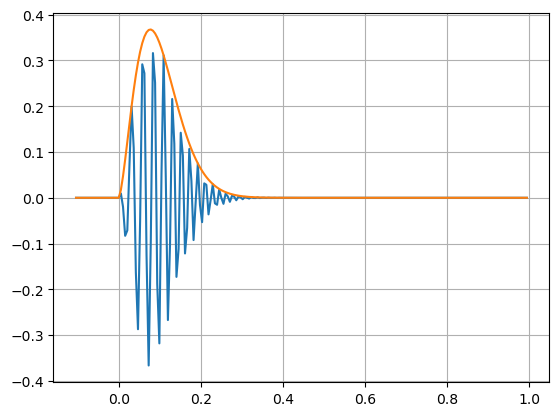
In the following we simulate the beamforing with a line array of Zc clicks
## Simulation of Zc clicks
import numpy as np
import matplotlib.pyplot as plt
def zcSig(tt,f0,fm,aa,bb,cc):
return (aa*tt)**bb * np.exp(-(aa*tt)**cc + 2*np.pi*1j*(f0+fm*tt)*tt)
fs=192 #kHz
ts=1 #ms
tt=np.arange(0,ts,1/fs)
f0=30
fm=60
aa=13
bb=1.5
cc=1.5
ss=zcSig(tt,f0,fm,aa,bb,cc)
ss=np.append(np.zeros((20,1)),ss)
tt=(-20+np.arange(len(ss)))/fs
#tt=np.arange(-20/fs,ts,1/fs)
plt.plot(tt,np.real(ss));
plt.plot(tt,np.abs(ss));
plt.grid(True)
plt.show()
# Line array
c=1500 # m/s sound speed
d=0.0125 # hydrophone spacing (0.75/60)
N=10 # number of hydrophones
print('d:',d)
h=np.arange(N)*d
d: 0.0125
#
# Overlap-add FIR filter, (c) Joachim Thiemann 2016
# https://github.com/jthiem/overlapadd/blob/master/olafilt.py
#
def fftfilt(b, x, zi=None):
"""
Filter a one-dimensional array with an FIR filter
Filter a data sequence, `x`, using a FIR filter given in `b`.
Filtering uses the overlap-add method converting both `x` and `b`
into frequency domain first. The FFT size is determined as the
next higher power of 2 of twice the length of `b`.
Parameters
----------
b : one-dimensional numpy array
The impulse response of the filter
x : one-dimensional numpy array
Signal to be filtered
zi : one-dimensional numpy array, optional
Initial condition of the filter, but in reality just the
runout of the previous computation. If `zi` is None or not
given, then zero initial state is assumed.
Returns
-------
y : array
The output of the digital filter.
zf : array, optional
If `zi` is None, this is not returned, otherwise, `zf` holds the
final filter delay values.
"""
L_I = b.shape[0]
# Find power of 2 larger that 2*L_I (from abarnert on Stackoverflow)
L_F = 2<<(L_I-1).bit_length()
L_S = L_F - L_I + 1
L_sig = x.shape[0]
offsets = range(0, L_sig, L_S)
# handle complex or real input
if np.iscomplexobj(b) or np.iscomplexobj(x):
fft_func = np.fft.fft
ifft_func = np.fft.ifft
res = np.zeros(L_sig+L_F, dtype=np.complex128)
else:
fft_func = np.fft.rfft
ifft_func = np.fft.irfft
res = np.zeros(L_sig+L_F)
FDir = fft_func(b, n=L_F)
# overlap and add
for n in offsets:
res[n:n+L_F] += ifft_func(fft_func(x[n:n+L_S], n=L_F)*FDir)
if zi is not None:
res[:zi.shape[0]] = res[:zi.shape[0]] + zi
return res[:L_sig], res[L_sig:]
else:
return res[:L_sig]
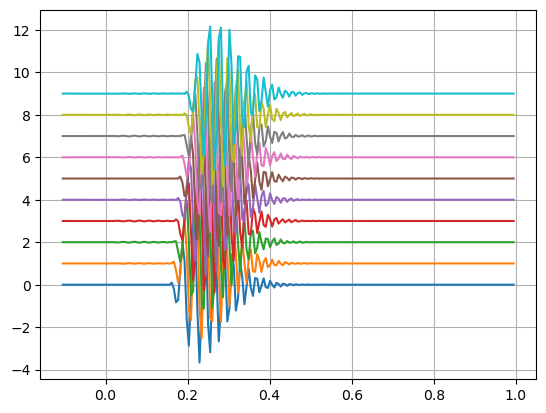
simulate measurements#
estimate the arrival times (up to a constant) for all hydrophones
delay time series using a fractional sinc function
A sinc function is used as it is an all-pass filter with well defined delay proprty. Other interpolating low-pass filter may be used (e.g. Kaiser filters). The filters should be of FIR type to have well defined delay properties.
Here, to simplify algorithm, no integer resampling is done, requiring somewhat more coefficients to minimize edge effects.
import scipy.signal as signal
fs=192000
#
if 0:
# noise
noise_power = 0.001 * fs / 2
ndat=fs//100
M=np.random.normal(scale=np.sqrt(noise_power), size=(N,ndat))
# estimate power spectral density (PSD)
win=signal.get_window("hann",1024)
f, Pxx_dens = signal.welch(M[0,:], fs=fs, nperseg=len(win), noverlap=0, scaling="density", window=win)
plt.semilogy(f/1000, Pxx_dens)
plt.xlabel('Frequency [kHz]')
plt.ylabel('PSD [V**2/Hz]')
plt.ylim(1e-6,1e-1)
plt.grid(True)
plt.show()
# signal
iao=60 # simulated angle
xo=ss.real
# simulated delays relative to hydrophone 0
tau=np.arange(N)*d/c*np.cos(iao*np.pi/180)
yy=np.zeros((len(xo),N))
kk=np.arange(-30,30,1);
for ii in range(N):
uu=np.sinc(kk-tau[ii]*fs)
yy[:,ii]=fftfilt(uu,xo)
plt.plot(tt,yy*10+np.ones((yy.shape[0],1))*range(N))
plt.grid(True)
plt.show()
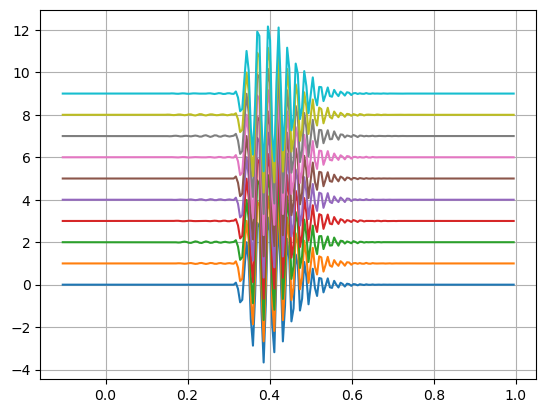
check steering#
To check method compensate simulated delay so that all hydrophone receive in parallel
# check steering (replace sinc(kk-tau[ii]*fs) by sinc(kk+tau[ii]*fs))
vv=np.zeros((len(ss),N))
for ii in range(N):
uu=np.sinc(kk+tau[ii]*fs)
vv[:,ii]=fftfilt(uu,yy[:,ii])
plt.plot(tt,vv*10+np.ones((vv.shape[0],1))*range(N))
plt.grid(True)
plt.show()
spatial filtering (beamformer)#
Create first the filter coefficient matrix
filter all hydrophone using the adequate coefficients.
for each time step average all hydrophones
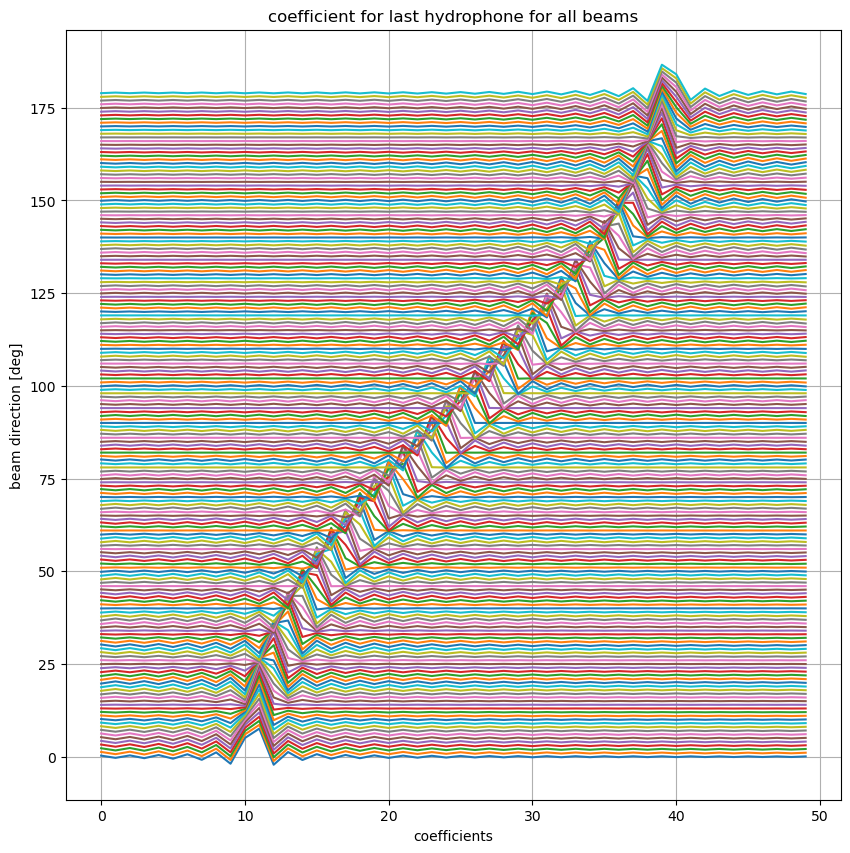
inpection of the coefficients indicate that for the 0 and 180 deg cases edge effects may occur at the end of the array.
# beamformer
def delayMatrix(dd,maxDel):
# generate delay coefficient matrix
nc=np.ceil(maxDel)+10 # assume nimimum sinc coefficients: -10:10
kk=np.arange(-nc,nc)
#
ww = np.zeros((len(kk),dd.shape[0],dd.shape[1]))
for cc in range(ndir): # over all beams
for ii in range(N): # over all hydrophones
arg=kk+dd[ii,cc]
ww[:,ii,cc]=np.sinc(arg)
return ww
ndir=180
dd=h.reshape(-1,1)/c*np.cos(np.arange(ndir)/ndir*np.pi)*fs
maxDel=h[-1]/c*fs
ww=delayMatrix(dd,maxDel)
plt.figure(figsize=(10,10))
plt.title('coefficient for last hydrophone for all beams')
plt.plot(ww[:,-1,:]*10+np.ones((ww.shape[0],1))*range(ndir))
plt.xlabel('coefficients')
plt.ylabel('beam direction [deg]')
plt.grid(True)
plt.show()
# filter data (beamformer)
def beamform(ww,yy):
vv=np.zeros(yy.shape)
zz=np.zeros((yy.shape[0],ww.shape[2]))
for cc in range(ndir): # over all beams
for ii in range(N): # over all hydrophones
vv[:,ii]=fftfilt(ww[:,ii,cc],yy[:,ii])
zz[:,cc]=np.mean(vv,axis=1) # sum hydrophones for each beam
return zz
#
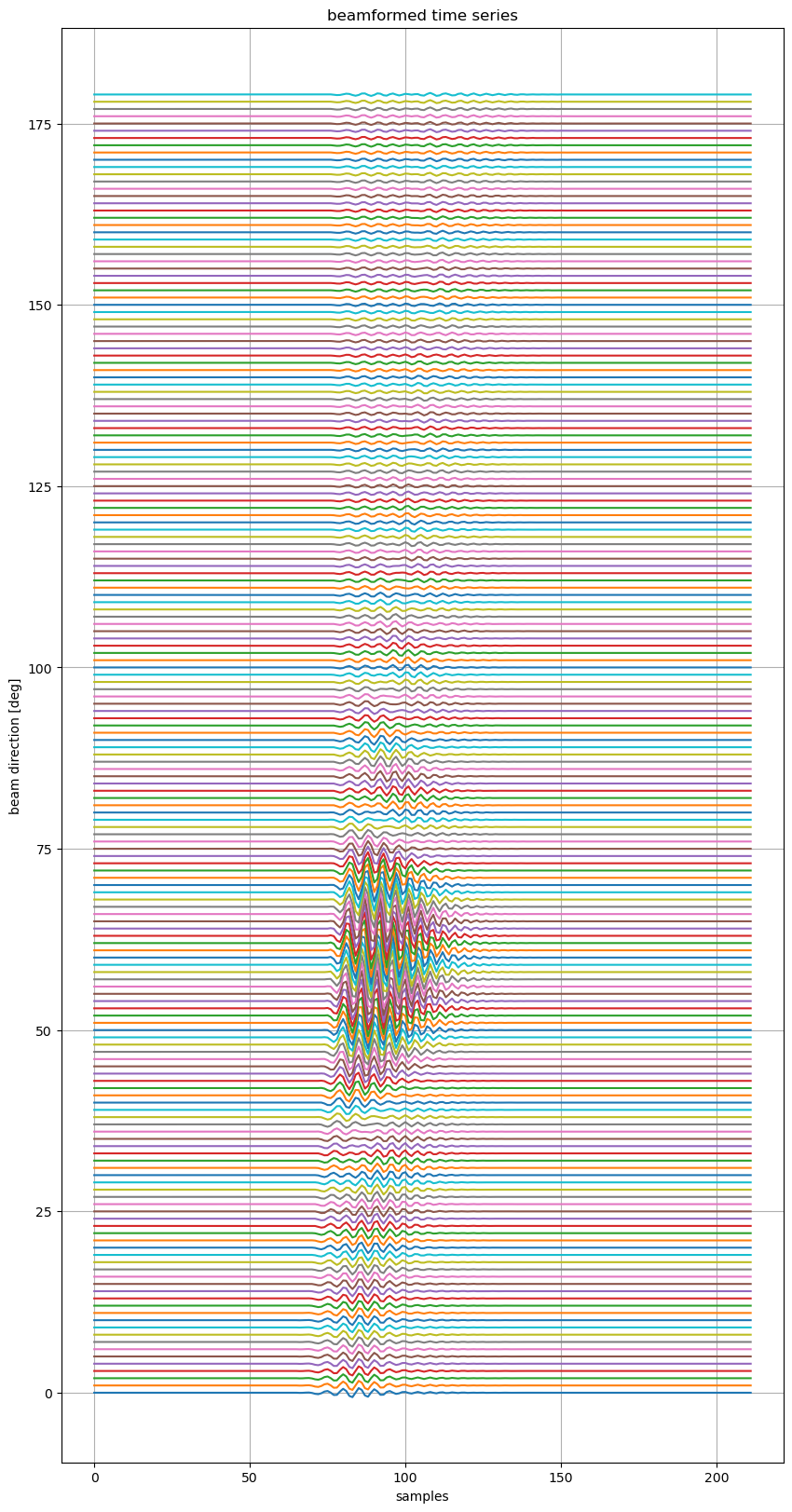
zz=beamform(ww,yy)
plt.figure(figsize=(10,20))
plt.title('beamformed time series')
plt.plot(zz*10+np.ones((zz.shape[0],1))*range(ndir))
plt.xlabel('samples')
plt.ylabel('beam direction [deg]')
plt.grid(True)
plt.show()
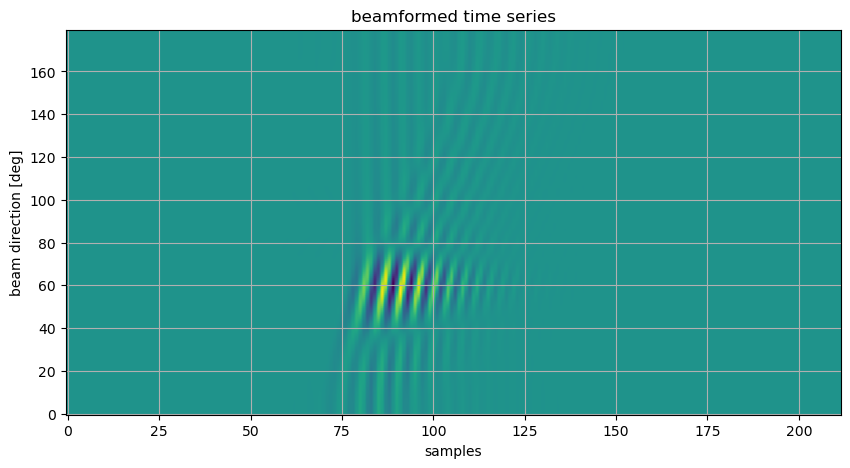
plt.figure(figsize=(10,5))
plt.title('beamformed time series')
plt.imshow(zz.T,aspect='auto',origin='lower')
plt.xlabel('samples')
plt.ylabel('beam direction [deg]')
plt.grid(True)
plt.show()
#
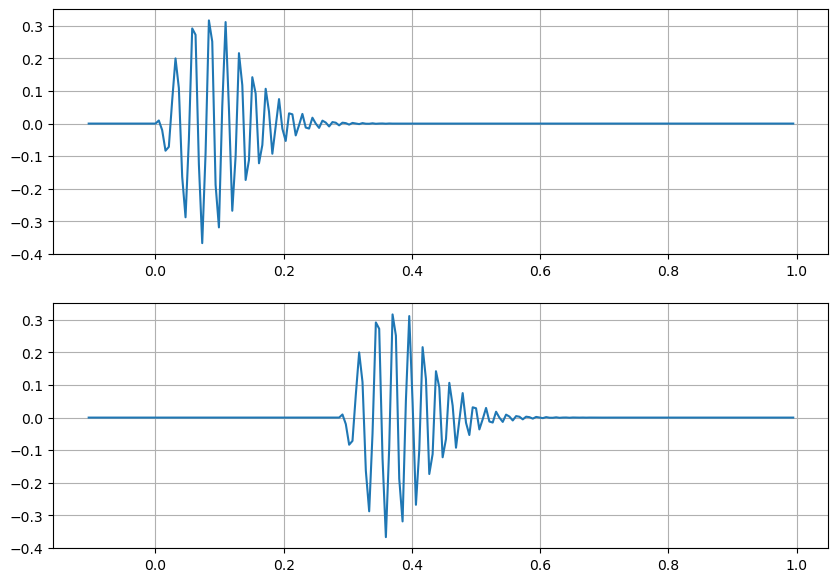
# compare with input signal
plt.figure(figsize=(10,7))
plt.subplot(211)
plt.plot(tt,ss.real)
plt.grid(True)
plt.subplot(212)
plt.plot(tt,zz[:,iao])
plt.grid(True)
plt.show()